测试运行
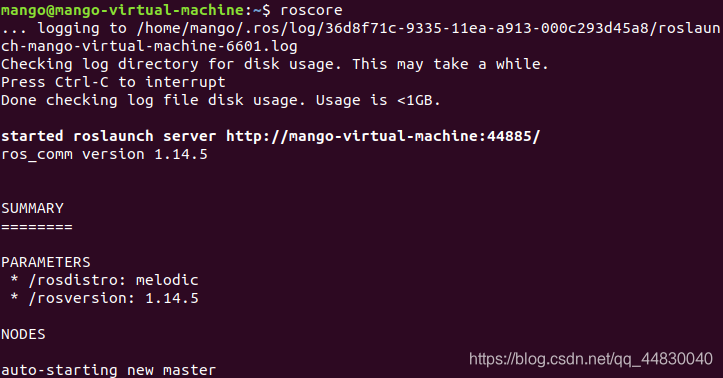
roscore 是ROS(Robot Operating System)系统中的核心命令,其主要作用是启动ROS Master节点。ROS Master节点负责管理ROS系统中所有节点之间的通信,包括节点的发现、消息的路由和参数服务器等功能。在运行ROS应用程序之前,通常需要先启动roscore命令以确保ROS Master节点已经启动并正常工作
1.第一个终端运行如下命令
roscore
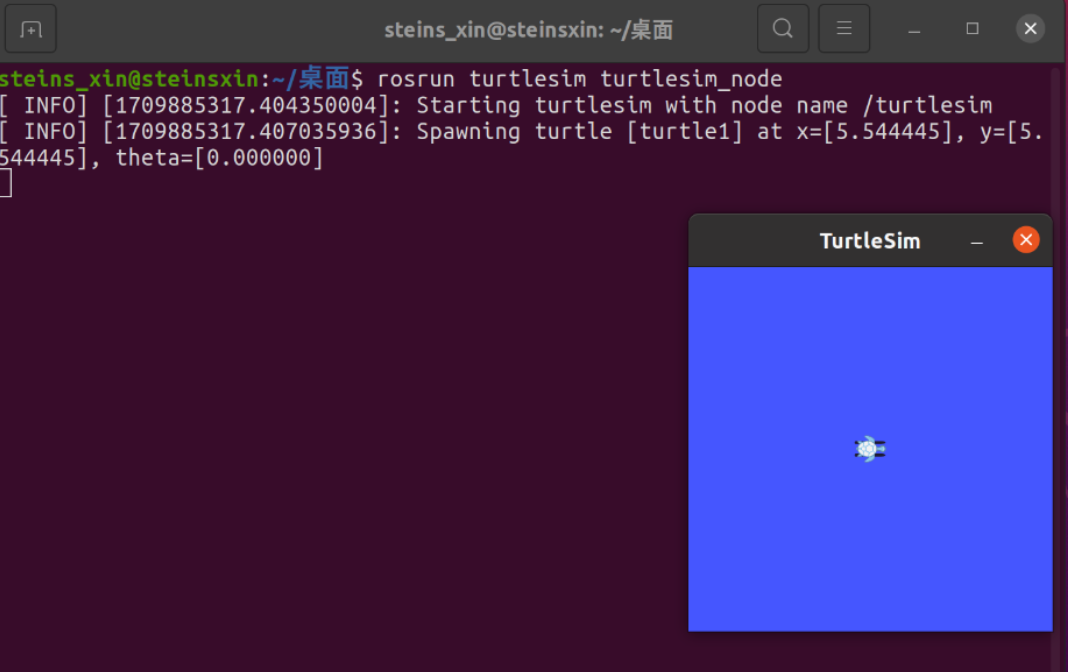
2.打开第二个终端
运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node
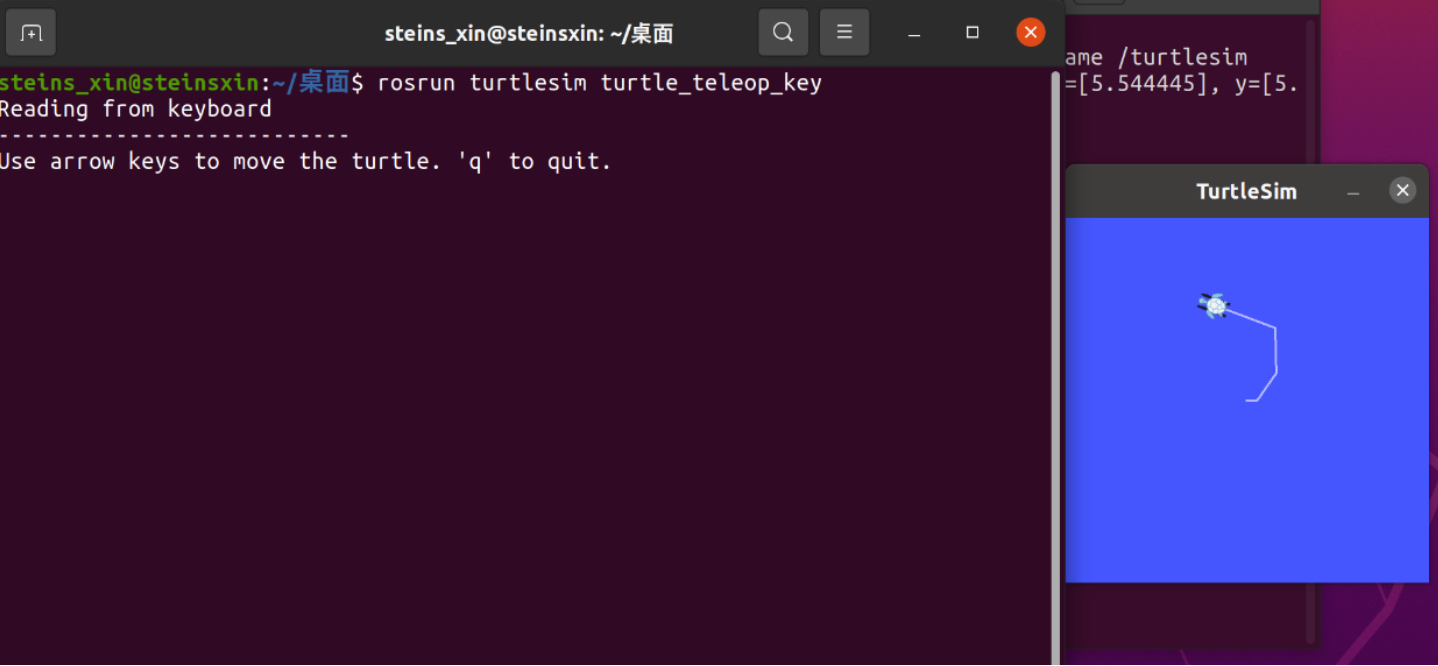
3.打开第三个终端,启动turtlesim的键盘控制节点turtle_teleop_key
rosrun turtlesim turtle_teleop_key
这里你的鼠标要停留在当前这个终端界面,按键盘上面的 上下左右 来控制小海龟的移动
在当前终端下,按住方向键即可控制小海龟移动