Armor_Track
装甲板跟踪是一个重点,在本章里面,你需要掌握跟踪实现的基本方法以及逻辑
Track也是很多代码相互交汇的一个节点,很多其他的功能包都会引入这里,所以这里的学习难度将会有一个巨幅提高
接下来我将会一个模块一个模块进行拆解,将诸如整车观测、陀螺状态等部分先进行跳过,跳过的模块将在后面进行讲解
这里会突出跟踪部分的逻辑,希望你可以掌握好这一部分再进行下面的学习
装甲板跟踪会用到的基本函数如下
bool Track(const cv::Mat& src, std::vector<Armor> &armors, const chrono_time &time); // 预测流程入口函数
void Reset(); // 重置初始化
void show();
/** 跟踪观测函数 */
bool Initial(std::vector<Armor> &Armors); // 初始化函数
bool Lock_Armor(std::vector<Armor> &find_armors, double dt); // 两帧之间锁定装甲板
void State_solve(bool match);
接下来我将会为每一个函数进行解析
在对应的函数里面我会对相应的参数进行解释
如下是整体代码的运行逻辑
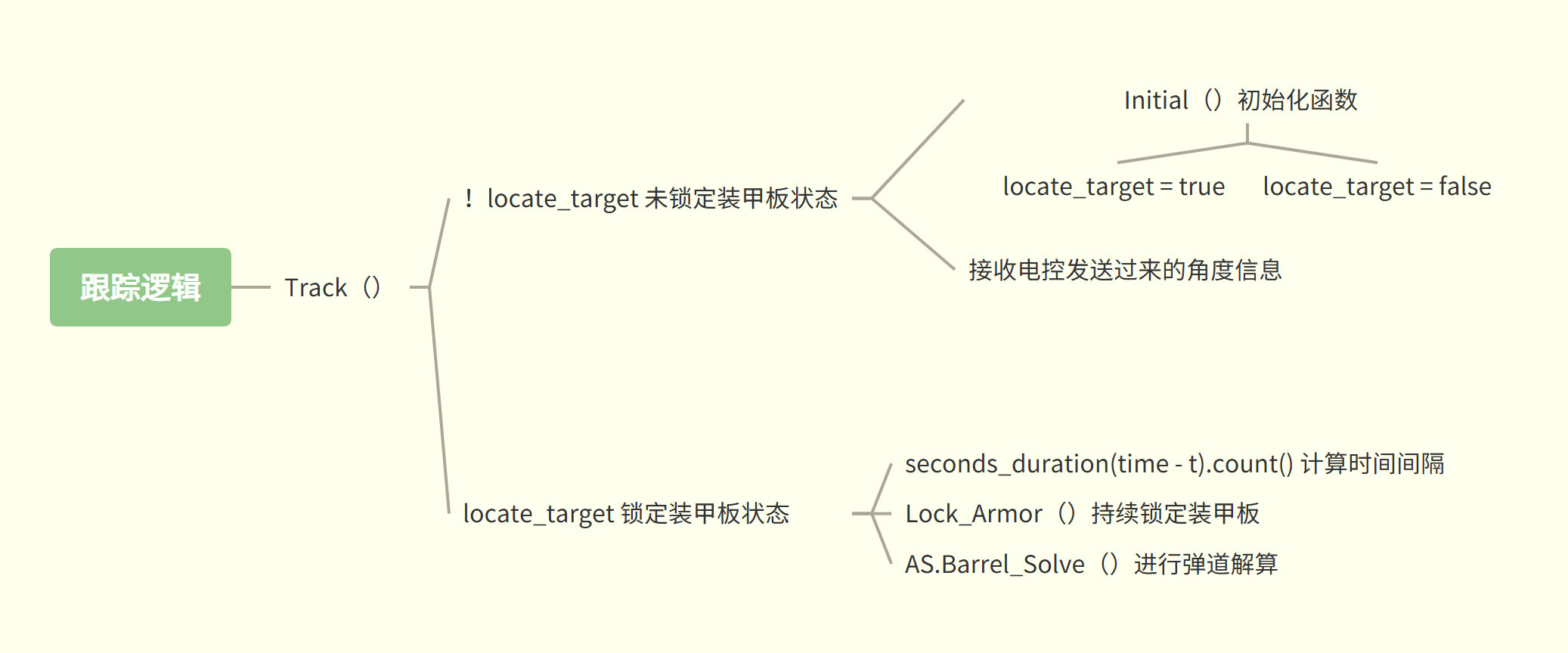
这里选择性的跳过了一些用不到的部分