State_solve
本函数功能:对装甲板的4个状态进行处理(TRACKING,DETECTING,LOSING,MISSING)
ArmorTrack::State_solve(bool match) {
/** DETECTING TRACKING状态的过渡 */
if (tracker_state == DETECTING) {
// DETECTING
if (match) { // 匹配次数到达阈值则开始跟踪
find_aim_number++; // 锁定目标次数++
if (find_aim_number > find_threshold) {
find_aim_number = 0; // 清零
tracker_state = TRACKING; // 设置为跟踪状态
}
} else { //没有目标,跳过该部分
find_aim_number = 0; // 清零
tracker_state = MISSING; // 将状态重置为没有目标状态
}
}
/** TRACKING 跟踪状态 */
else if (tracker_state == TRACKING) {
// TRACKING
if (!match) { // 未匹配则丢失
tracker_state = LOSING; // 丢失状态
lost_aim_number++; // 丢失目标次数++
}
}
/** LOSING 丢失状态 */
else if (tracker_state == LOSING) {
if (!match) { // 未匹配则累加丢失次数
lost_aim_number++;
if (lost_aim_number > lost_threshold) { // 超过丢失阈值,将跟踪器设置未没有目标
lost_aim_number = 0;
tracker_state = MISSING; // 将状态重置为没有目标状态
}
} else {
tracker_state = TRACKING; // 匹配到目标则设置回跟踪状态
lost_aim_number = 0; // 丢失次数清零
}
}
}
在这个函数里面,我们实现对状态的转换,这里就不得不引入一下 "状态机" 的概念和设计理念了
首先先解释什么是“状态”( State ):
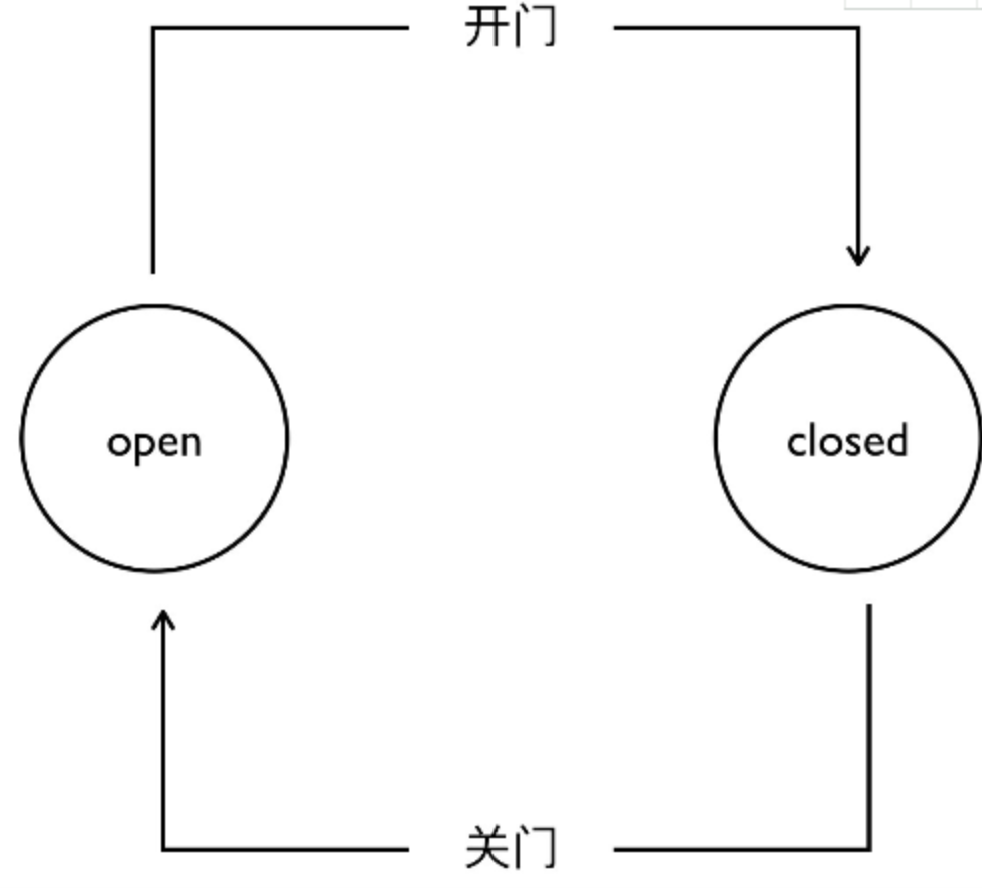
现实事物是有不同状态的,例如一个自动门,就有 open 和 closed 两种状态。我们通常所说的状态机是有限状态机,也就是被描述的事物的状态的数量是有限个,例如自动门的状态就是两个 open 和 closed ,如图:
状态机,也就是 State Machine ,不是指一台实际机器,而是指一个数学模型
状态机是有限状态自动机的简称,是现实事物运行规则抽象而成的一个数学模型
下面是状态机的四大概念:
第一个是 State ,状态。一个状态机至少要包含两个状态。例如上面自动门的例子,有 open 和 closed 两个状态。
第二个是 Event ,事件。事件就是执行某个操作的触发条件或者口令。对于自动门,“按下开门按钮”就是一个事件。
第三个是 Action ,动作。事件发生以后要执行动作。例如事件是“按开门按钮”,动作是“开门”。编程的时候,一个 Action一般就对应一个函数。
第四个是 Transition ,变换。也就是从一个状态变化为另一个状态。例如“开门过程”就是一个变换。
简单的来说就是,每一个状态有对应的执行函数和逻辑,根据条件判断是否要进行状态切换
这样做的好处是逻辑清晰,可以专注于当前状态层的实现,最后只需要写好状态的切换便可以将各个状态连接在一起,可以有效减少代码的耦合性
本函数的判断逻辑非常简单,需要特别注意的是 DETECTING 状态,这是一个比较特殊的状态
/** 跟踪状态 */
enum TrackerState {
MISSING, // 没有目标,跳过该部分
DETECTING, // 还未开始跟踪,作为跟踪第一帧的切换,初始化好卡尔曼
LOSING, // 处于丢失状态,还会保留预测
TRACKING, // 处于跟踪状态
};
如果当前图片中有在 Initial() 中已经锁定了的装甲板ID,那么match便是True,视为当前帧锁定成功
这个时候 find_aim_number++ 进行自增,当达到了设置的阈值 find_threshold 时候便会切换状态进入 TRACKING
/** DETECTING TRACKING状态的过渡 */
if (tracker_state == DETECTING) {
// DETECTING
if (match) { // 匹配次数到达阈值则开始跟踪
find_aim_number++; // 锁定目标次数++
if (find_aim_number > find_threshold) {
find_aim_number = 0; // 清零
tracker_state = TRACKING; // 设置为跟踪状态
}
} else { //没有目标,跳过该部分
find_aim_number = 0; // 清零
tracker_state = MISSING; // 将状态重置为没有目标状态
}
}
TRACKING 状态的逻辑也简单,如果当前帧没能识别到锁定的ID (假设是1),就会进入 LOSING 状态,同时 lost_aim_number 自增
/** TRACKING 跟踪状态 */
else if (tracker_state == TRACKING) {
// TRACKING
if (!match) { // 未匹配则丢失
tracker_state = LOSING; // 丢失状态
lost_aim_number++; // 丢失目标次数++
}
}
接下来便看 LOSING 状态
/** LOSING 丢失状态 */
else if (tracker_state == LOSING) {
if (!match) { // 未匹配则累加丢失次数
lost_aim_number++;
if (lost_aim_number > lost_threshold) { // 超过丢失阈值,将跟踪器设置未没有目标
lost_aim_number = 0;
tracker_state = MISSING; // 将状态重置为没有目标状态
}
} else {
tracker_state = TRACKING; // 匹配到目标则设置回跟踪状态
lost_aim_number = 0; // 丢失次数清零
}
}
进入了LOSING 状态,并且持续了 lost_threshold 次,也就是持续了一段时间都未能找到之前锁定的ID(1),就会进入MISSING状态
在 MISSING 状态下,所有的东西都就重置,包括锁定的装甲板ID,这个时候就会重复一次所有的流程,在 Initial() 里面重新锁定一个装甲板ID
如果在此期间又出现锁定的装甲板ID,便会重新回到 TRACKING 状态,并将 lost_aim_number 清空
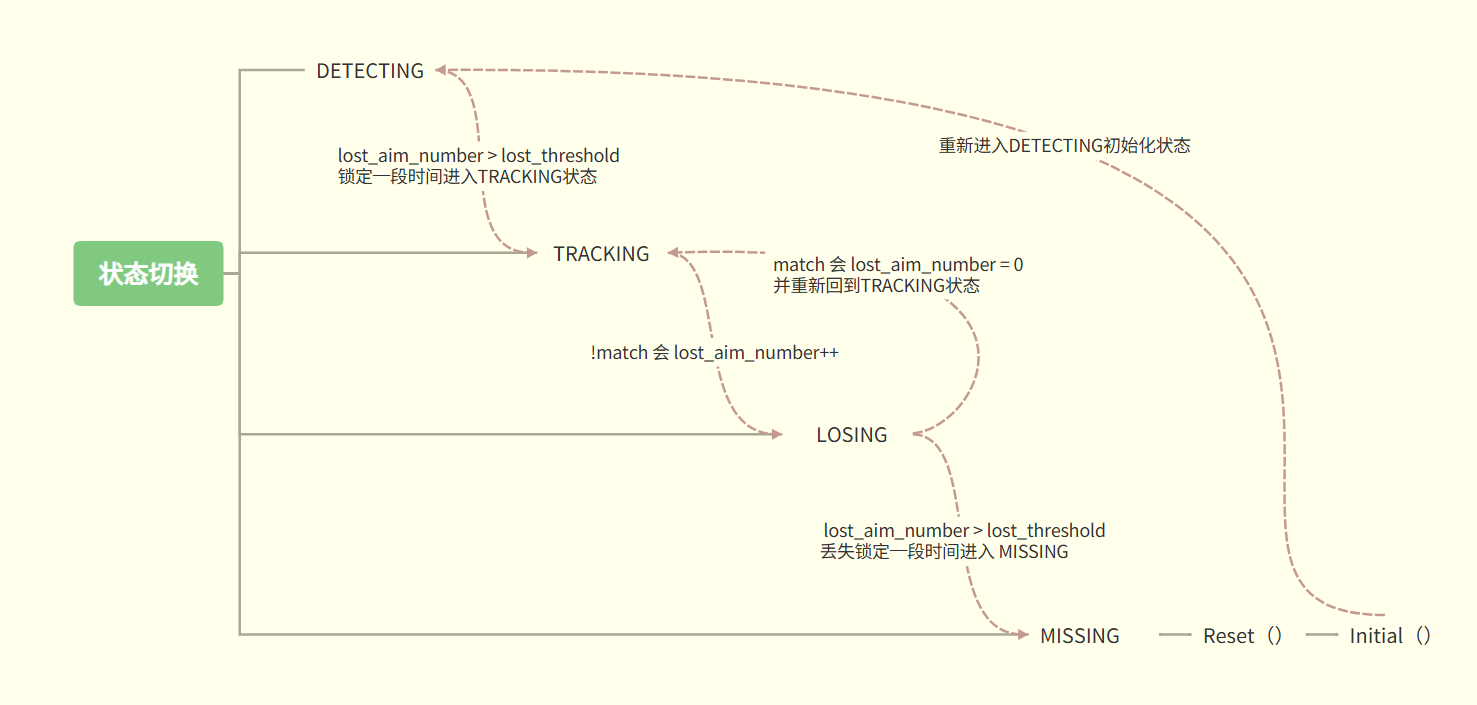
上面就是整个状态切换的流程图